
Nota Pengajian Kejuruteraan Elektrik Dan Elektronik Tingkatan 5 Bab 2: Sistem Elektronik Digit Dan Pengawal Logik Boleh Atur Cara
10
11
01
00
ELEKTRONIK DIGIT &
PLC
Memanipulasi logik get elektronik dan menguasai bahasa pengaturcaraan Rajah Tangga bagi mengawal sistem automasi Pengawal Logik Boleh Atur Cara (PLC).
GET LOGIK ASAS (SIMBOL IEC)
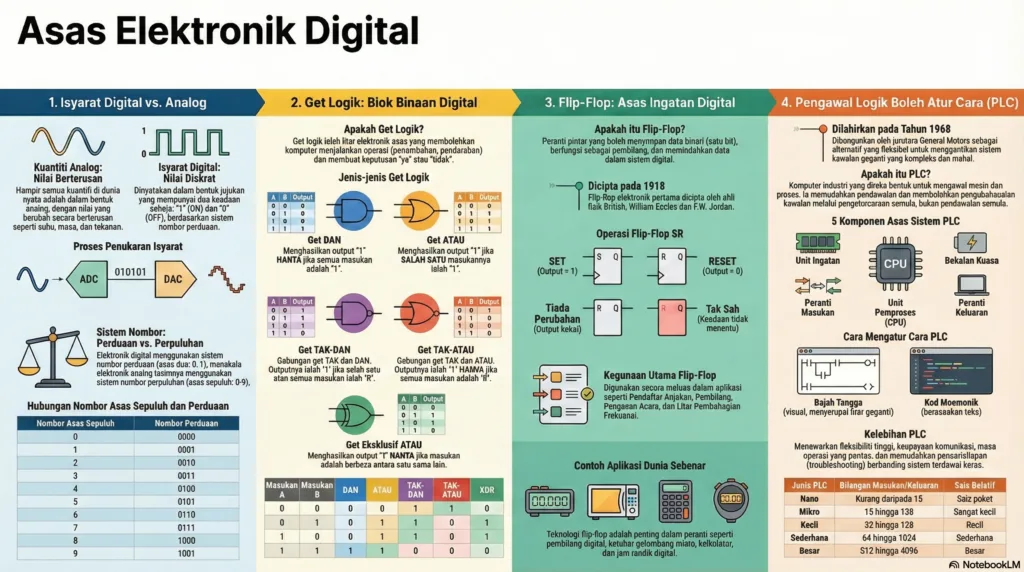
Isyarat digit beroperasi dalam dua keadaan diskret iaitu logik 0 (Rendah/OFF) dan logik 1 (Tinggi/ON). Get logik memproses isyarat masukan ini untuk menghasilkan satu isyarat keluaran berdasarkan Jadual Kebenaran dan Persamaan Boolean.
DAN (AND)
Imbas Info
X = A · B
Keluaran 1 hanya jika SEMUA masukan 1.
| A | B | X |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
ATAU (OR)
Imbas Info
X = A + B
Keluaran 1 jika SALAH SATU atau semua masukan 1.
| A | B | X |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |
TAK (NOT)
Imbas Info
X = A
Keluaran sentiasa menyongsang masukan.
| A | X |
|---|---|
| 0 | 1 |
| 1 | 0 |
TAK-DAN
Imbas Info
X = A · B
Lawan fungsi DAN. Keluaran 0 jika semua 1.
| A | B | X |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
TAK-ATAU
Imbas Info
X = A + B
Lawan fungsi ATAU. Keluaran 1 hanya jika semua 0.
| A | B | X |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 0 |
EKS-ATAU
Imbas Info
X = A ⊕ B
Keluaran 1 jika isyarat masukan BERBEZA nilai.
| A | B | X |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
EKS-TAK-ATAU
Imbas Info
X = A ⊕ B
Keluaran 1 jika isyarat masukan SAMA nilai.
| A | B | X |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
Senibina Sistem PLC
Pengawal Logik Boleh Atur Cara (PLC) ialah komputer industri yang digunakan khas untuk mengawal jentera atau proses pengeluaran secara automatik. Ia dicipta untuk menggantikan litar kawalan geganti elektromagnet konvensional yang rumit.
GAMBAR RAJAH BLOK PLC
Peranti Masukan
Penderia, Suis Tekan, Suis Had. Menghantar isyarat ke PLC.
Bekalan Kuasa
Menukar voltan bekalan AU kepada voltan AT (cth: 24V DC) untuk litar PLC.
Pemproses (CPU)
Otak PLC. Menerima data, melaksanakan atur cara logik, dan mengeluarkan arahan.
Unit Ingatan
Menyimpan sistem operasi (ROM) dan atur cara logik pengguna (RAM).
Peranti Keluaran
Motor, Lampu, Solenoid. Digerakkan berdasarkan arahan dari CPU.
Peranti Pengaturcaraan
Komputer atau konsol genggam untuk menulis dan memuat turun program ke PLC.
PLC terbahagi kepada dua jenis binaan utama: Jenis Kompak (terbina dalam satu unit) dan Jenis Modular (boleh ditambah modul rak).
Pengaturcaraan PLC
PLC dikawal melalui atur cara yang ditulis menggunakan Rajah Tangga (Ladder Diagram) atau Kod Mnemonik. Bahasa ini direka supaya mudah difahami oleh jurutera kerana ia menyerupai skematik litar geganti konvensional.
Contoh Litar Rajah Tangga
Arahan Asas (Mnemonik)
| Kod | Maksud | Operasi Simbol Litar |
|---|---|---|
| LD | Load | Memulakan talian logik (sambung terus ke rel kuasa kiri) dengan sesentuh Biasa Terbuka (NO). |
| LD NOT | Load Not | Memulakan talian logik dengan sesentuh Biasa Tertutup (NC). |
| AND | Dan | Menyambung sesentuh secara Siri (NO). |
| OR | Atau | Menyambung sesentuh secara Selari (NO). Digunakan untuk litar selak. |
| OUT | Out | Mewakili gegelung keluaran yang akan diaktifkan di akhir garisan (rung). |
| END | End | Penamat mutlak bagi satu atur cara PLC. |
Sistem Elektronik Digit & PLC
Ujian Kompetensi Modul 2
> JUMLAH: 10 Soalan Rawak
> ENKRIPSI: Jawapan Dirombak (Shuffled)
> BANTUAN: Analisis Litar & Logik Disediakan
Memuatkan Soalan…
DIAGNOSTIK SELESAI
Imbasan tahap kefahaman anda:
Keterangan diagnostik di sini.
GLOSARI PLC & LOGIK DIGITAL
CONTOH SOALAN KBAT: PLC & LOGIK
Analisis sistem kawalan industri, pengaturcaraan rajah tangga, dan aplikasi logik jujukan.
Masukan: Sambungkan suis tekanan ke IN 0 dan suis suhu ke IN 1 pada modul PLC dengan bekalan 24V DC.
Keluaran: Sambungkan motor ke OUT 0 dengan bekalan 230V AC yang bersesuaian.
Logik: Gunakan Logik AND (sesiri) dalam rajah tangga supaya motor hanya aktif apabila kedua-dua suis berada dalam keadaan tertutup.
Simulasi menyediakan persekitaran ideal, manakala perkakasan mendedahkan prestasi dunia sebenar. Ralat boleh berlaku disebabkan:
- Toleransi Komponen: Nilai fizikal komponen mempunyai ralat (±5%).
- Hingar Elektrik: Gangguan persekitaran yang tidak wujud dalam kod.
- Kualiti Sambungan: Rintangan pada papan reka atau wayar longgar.
Arahan TIM (Pemasa): Digunakan untuk lengahan masa, seperti memberhentikan lengan motor selama 30 saat di posisi tertentu sebelum bergerak semula.
Arahan CNT (Pembilang): Digunakan untuk menjejaki kitaran operasi, memastikan sistem berhenti secara automatik setelah mencapai bilangan ulangan yang ditetapkan (cth: 75 kali).
PILIHAN PLC Jenis Mikro atau Kecil (15 – 128 I/O) adalah paling tepat.
Justifikasi Ekonomi: Memilih PLC berskala Sederhana/Besar adalah pembaziran kos kerana banyak port tidak digunakan. PLC Mikro memenuhi fungsi teknikal dengan kos minimum, selaras dengan prinsip Peka Ringgit dalam pengurusan projek.
Konsep ini dilaksanakan melalui Suap Balik (Feedback) keluaran. Keadaan keluaran sedia ada dimasukkan semula ke dalam logik masukan untuk mengekalkan status (Latching).
Kepentingan: Ia membolehkan PLC mengingati peristiwa (cth: motor kekal hidup selepas butang ditekan seketika) dan memastikan langkah jujukan (Isi $\rightarrow$ Panas $\rightarrow$ Adun) berlaku mengikut turutan yang betul.